点击右上角 微信好友
微信好友
 朋友圈
朋友圈

请使用浏览器分享功能进行分享
![]()

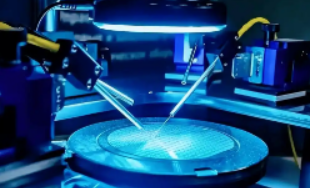
南通大学师生团队开发的智能水下检修机器人。受访者供图
7月的黄海之滨,水面波涛万顷,一排排百米高的白色风机迎风摇曳。水下暗流涌动,硕大的风机桩直插海底,一个黄色的方形机器人正吸附在风机桩上,完成它的又一次水下巡检作业。
记者7月初从南通大学获悉,一款集目标识别、表面清理、无损探伤和湿法焊接多功能于一体的智能水下检修机器人,在该校电气工程学院研发成功,为海工企业未来的检修工作提供了新的方向。
月薪20万的工作无人问津
茫茫无际的大海上,每天都有许多的船只穿梭航行。水面以上,这些船只乘风破浪,威风凛凛;而水面以下,各种隐患暗处潜伏:船体焊接裂缝、海水侵蚀受损……这些细小问题往往意味着后患无穷。
出现了这些问题怎么办?最直接的方式,就是把船拉进船坞进行维修。但对于船只在航行过程中遇到的急需修复的问题,这种方法显然是不适合的。因此,人们想到在水下修复船只。1802年,一位名叫汉弗莱的学者发现电弧能在水下连续燃烧,这为水下焊接创造了可能。
经过多年发展,水下焊接形成干法、湿法和局部干法三种主要方式。其中,湿法焊接是三者中应用最多的技术,但其缺陷在于水具有导电性,安全性较差。
目前,水下焊接的实现在现阶段还是依靠人力。焊接工作本身就是一个辛苦的职业,更何况是在水下进行焊接,其难度不言而喻。工人们往往需要经过专业的潜水培训,下水前,焊条焊机、潜水头盔、潜水服、铅块腰带、空压机、氧气瓶、对讲机等全部都要配备齐全。在水下,他们不仅要面临高水压和温度的挑战,如果水质污浊,还会成为“睁眼瞎”。
2019年12月,作为南通大学的一名学生,言淳恺跟随指导老师在南通开沙岛船舶海工企业考察时,了解到水下人工焊接的种种不便。“行业内能够下水检修的专业人员非常少。中国船级社今年公布的数据,国内持有无损探伤水下焊接证书的人不超过150个,这导致船舶检修行业存在巨大的人力资源缺口。即使开出20万的月薪,能做、愿意做的人也很少。”言淳恺感慨道。
面对行业严峻的现实以及企业的需求,言淳恺在老师的指导下组建学生科研团队,提出解决设想,设计研发出一款能代替人类下水检修的机器人。
多项创新助力水下自主检修
带着这样的想法,团队成员首先对市面上的水下检修机器人做了调查。他们发现,在国内能够将检测和焊接技术融于一体的水下检修设备是业内的一个重要研究方向,存在一定技术难度的同时,市场前景广阔。
从2020年2月开始,团队一头扎进了水下自主检修机器人的研究开发中。
机器人进行水下作业的首要步骤是进行目标识别。系统会根据图片原理,基于先验机制,依次划分海底线和目标结构件,实现粗定位。
“我们曾经去江苏海上龙源风力发电有限公司(以下简称龙源)进行实地考察,发现海底的水比较浑浊,直接影响到水下能见度。”言淳恺说。为了解决这个问题,团队在原有的视觉识别基础上,运用声呐增强声信号,并且在机器上添加辅助光源和偏振片,在后期图像上也做了增强处理。
由于长时间的浸泡,风电桩基础和船只底板的表面会有海洋生物附着,因此目标识别结束后需要用高压水射流清理表面后再进行无损探伤。一开始,团队尝试用单一的超声波技术进行探伤,但效果不佳。后来,他们将超声波和视觉探视相结合,有效提高了探伤精度。
检修完毕后,就需要进行焊接。实际作业时,水下能见度很低,因此水下焊接往往十分依赖经验。工人一手拿着焊条一手拿着焊机,自主把控焊接的角度和力度,如果稍不留神,手套就会被烫坏。
在智能水下检修机器人的研发过程中,团队利用结构光来增强焊缝特征,以便摄像头快速找到缺陷处,离线焊缝跟踪后进行焊接作业。
“因为操作相对繁琐,我们在湿法焊接方面耗费了将近一年的时间。”言淳恺说道。通过不断试错推演,团队终于克服了水下焊接修复的难点,实现了水深小于5米的稳定焊接作业。
有望运用于更多场景中
在今年5月份的“挑战杯”全国大学生系列科技学术竞赛江苏省赛中,“智能水下检修机器人”从706个项目中脱颖而出,荣获江苏省特等奖并且入围国赛。由于一代设备作业时稳定性欠佳,团队成员听从专家建议,对一代设备进行了改进升级,主要针对面向海上风电桩基础的检修设计吸附固定装置。
“机器人水下作业时,水流影响较大,最初,我们设计了2个臂,通过磁吸附的方式将机器人固定于风电桩。通过实验,发现稳定性还有待提高。于是在机器人下方位置增加了1个臂,并将3个臂设计为可前后伸缩,三角形的构造让机器人更稳定。”指导老师、南通大学教师杨慧说。
改进后的第二代机器人,相较于一代有了不少改进,那么走出实验室,在实际检修工作中,它能不能为海工企业带来惊喜?
杨慧告诉记者,智能水下检修机器人研发成功后,他们立即与企业进行了合作,检验机器人的性能。
在龙源考察时,杨慧了解到,该公司的维修人员并不具备水下维修资质,因此无法对水下部分进行定期检修,只能被动地等风电桩出现问题后,把风电机组关停再进行维修。与龙源携手后,团队的智能水下检修机器人帮助龙源进行海上风电桩基础的水下巡检,发现了多处轻度腐蚀。
今年上半年,团队又与大连中远海运海事工程技术有限公司南通分公司合作,对万吨级船舶进行检修,大大提高了检修作业效率,在船侧板的检修中发挥了重要作用。
“海洋工程产业已涉及油气、风电等多个领域,对人类社会经济生活的影响日益广泛和深入,将人工智能成功运用于船舶行业能够有力推动海工装备产业的高质量发展。目前设备服务对象主要针对船体和海上风电桩,未来有望延伸至核电站塔架等多种场景中。”杨慧说。(记者 张 晔 通讯员 李淑媛 詹梓榆 季天宇)


一杯咖啡焕新城市老街 解锁消费新场景

甘肃陇南全力开展防汛抗洪工作